任务描述
采用CUDA实现矩阵乘法:A矩阵:1024x1024,B矩阵:1024x1024,C矩阵:1024x1024,目标是尽可能的减少整个流程时间
学习目标
- 入门cuda,什么是cuda,cuda的基本操作
- 如何对一个cuda问题,基于cuda领域持续优化,从哪些角度思考,优化cuda需要结合硬件情况,不只是考虑算法的时间复杂度,也需要从硬件是否可以实现甚至实现的高效性考虑,同时也需要上机器评测,部分数值需要实际机器实验佐证
- Nsight System安装和使用,工具侧帮助分析算法性能
- triton加速https://zhuanlan.zhihu.com/p/697626885
多个版本的优化
cpu版本
CPU版本串行Naive Algorithm(基础版),时间复杂度O(n^3),
void matrixSerial(float *hostA, float *hostB, float *hostC, int M, int K,
int N) {
for (int i = 0; i < M; i++) {
for (int j = 0; j < N; j++) {
float tmp = 0;
for (int s = 0; s < K; s++) {
tmp += hostA[i * K + s] * hostB[s * N + j];
}
hostC[i * N + j] = tmp;
}
}
}
串行CPU算法的优化还有使用矩阵分块理论,能减少常量但是时间复杂度保持不变O(n^3)。另外经典的 Strassen算法是一种基于分治法的优化算法,通过减少乘法次数来降低时间复杂度。时间复杂度为 \(O(n^{log_{2}^{7}})\) 最新nature文章《Discovering faster matrix multiplication algorithms with reinforcement learning》通过强化学习来挖掘出新的矩阵乘法分块策略,类似NAS的思路,开创新的算法研究方向。
GPU版本
多个GPU优化思路版本
v1: 基础版
v2: 共享内存分块
v3: 寄存器分块
v4: 重排索引
v5: float4访存
v6: 解bank冲突
v7: 内积转外积
v8: 双缓冲
v9:cublas
v10: tensor core来优化
第一版本:基础版
优化思路
GPU的计算流程本质是类似map-reduce的处理方式,对矩阵每个元素并发(非并行)计算得到整个矩阵的结果。
代码实现
__global__ void matrixKernal1st(float *dA, float *dB, float *dC, int M, int K,
int N) {
int row = threadIdx.x + blockIdx.x * blockDim.x;
int col = threadIdx.y + blockIdx.y * blockDim.y;
float tmp = 0;
if (row < M && col < N) {
for (int s = 0; s < K; s++) {
tmp += dA[row * K + s] * dA[s * N + col];
}
dC[row * N + col] = tmp;
}
}
性能比较
| 机器 | 运行参数 | GPU use time | kernel time | CPU time | The error between CPU and GPU |
|---|---|---|---|---|---|
| 单卡A100 显存80G | M-K-N: 1024-1024-1024 GPU use time: 0.5785 second kernel time: 0.0165 second, 16.5047 ms grid dim: 32, 32, 1 block dim: 32, 32, 1 CPU time:3.77 second The error between CPU and GPU: 0.0000e+00 |
0.5785 | 0.0165 | 3.77 | 0.0000e+00 |
| 单卡3090 显存24G | M-K-N: 1024-1024-1024 GPU use time: 0.8050 second kernel time: 0.0087 second, 8.7018 ms grid dim: 32, 32, 1 block dim: 32, 32, 1 CPU time:2.19 second The error between CPU and GPU: 0.0000e+00 |
0.8050 | 0.0087 | 2.19 | 0.0000e+00 |
第二版本:共享内存分块
优化思路
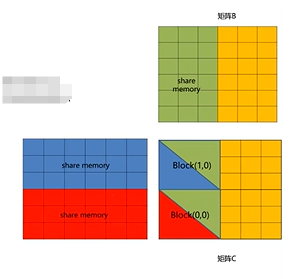
share memory的使用
- share memory:针对当前线程块所有线程都可见
- 假设矩阵A,B,C都是6×6的方阵,block_dim=(3.3,1),grid_dim=(2.2,1)
- 对于Block(0.0),设置共享内存数组SA[3][6]和SB[6][3],将对应矩阵元素从global memory 加载到share memory;
- 和原来相比,仍然存在重复读取的情况,但是原来重复读取的是global memory,现在重复读取的是share memory
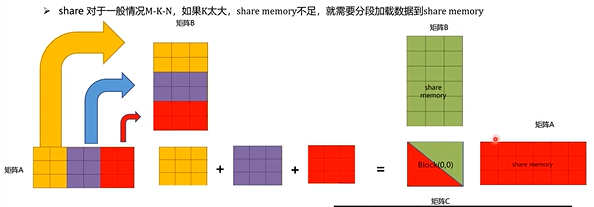
- share memory存放的SA形状为[BLOCK_DIM_x,K],SB形状为[K,BLOCK_DIM_y],如果K太大如何处理?
何时使用share memory何时不使用是依据相乘矩阵的尺寸决定
不使用share memory Thread角度:计算一个cij,需要访问global memory的A一行,B一列 Block角度:计算BLOCK_DIM_x * BLOCK_DIM_y个元素,访问global memory次数为BLOCK_DIM_x*BLOCK_DIM_yx(3K),计算访问比,计算访存比为1/(3K)
使用share memory Thread角度:计算一个cy需要循环K/BLOCK_DIM次,每次循环访问sharememory中SA一行,SB一列 Block角度:计算BLOCK_DIMxBLOCK_DIM个元素需要循环K/BLOCK_DIM次,每次循环访问global memory次数为BLOCK_DIM * BLOCK_DIM * 2,整体访问global memory次数为BLOCK_DIM×BLOCK_DIM×2×K/BLOCK_DIM+BLOCK_DIM×BLOCK_DIM=BLOCK_DIM×(2xK+BLOCK_DIM),计算访问比,计算访存比为1/(2K/BLOCK_DIM+1)
代码实现
template <int BLOCK_DIM>
__global__ void matrixKernel2nd(float *dA, float *dB, float *dC, int M, int K, int N)
{
int row = threadIdx.x + blockIdx.x * blockDim.x;
int col = threadIdx.y + blockIdx.y * blockDim.y;
float tmp = 0.0f;
__shared__ float SA[BLOCK_DIM][BLOCK_DIM];
__shared__ float SB[BLOCK_DIM][BLOCK_DIM];
int width = (K + BLOCK_DIM - 1) / BLOCK_DIM;
for (int ph = 0; ph < width; ph++)
{
if (row < M && threadIdx.y + ph * BLOCK_DIM < K)
{
SA[threadIdx.x][threadIdx.y] = dA[row * K + threadIdx.y + ph * BLOCK_DIM];
}
else
{
SA[threadIdx.x][threadIdx.y] = 0.0f;
}
if (threadIdx.x + ph * BLOCK_DIM < K && col < N)
{
SB[threadIdx.x][threadIdx.y] = dB[(threadIdx.x + ph * BLOCK_DIM) * N + col];
}
else
{
SB[threadIdx.x][threadIdx.y] = 0.0f;
}
__syncthreads();
for (int s = 0; s < BLOCK_DIM; s++)
{
tmp += SA[threadIdx.x][s] * SB[s][threadIdx.y];
}
__syncthreads();
}
if (row < M && col < N)
{
dC[row * N + col] = tmp;
}
}
性能比较
| 机器 | 运行参数 | GPU use time | kernel time | CPU time | The error between CPU and GPU |
|---|---|---|---|---|---|
| 单卡A100 显存80G | M-K-N: 1024-1024-1024 GPU use time: 0.3008 second kernel time: 0.0031 second, 3.0668 ms grid dim: 32, 32, 1 block dim: 32, 32, 1 CPU time:3.79 second The error between CPU and GPU: 0.0000e+00 |
0.5785 | 0.0165 | 3.77 | 0.0000e+00 |
| 单卡3090 显存24G | M-K-N: 1024-1024-1024 GPU use time: 0.6995 second kernel time: 0.0035 second, 3.5311 ms grid dim: 32, 32, 1 block dim: 32, 32, 1 CPU time:2.19 second The error between CPU and GPU: 0.0000e+00 |
0.6995 | 0.0035 | 2.19 | 0.0000e+00 |
第三版本:寄存器分块
优化思路
-
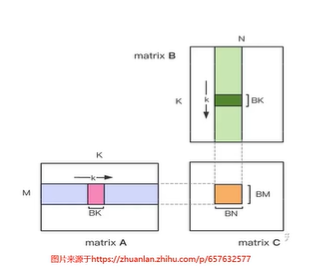
引入BM=BLOCK_DIM_x * TM,BN=BLOCK_DIM_y * TN
-
一个线程块计算矩阵C的元素数目为BMxBN,访问global memory中A,B的数目为BM * K+BN * K, 计算量为(BM×BN×K)×2
-
计算c元素需要循环次数为K/BK,每次循环读取A中BMxBK个元素进入share memory,从B中读 取BNxBK个元素进入share memory
-
BM,BN越大越好,但是share memory有限
代码实现
template <int BM, int BN, int BK, int TM, int TN>
__global__ void matrixKernel3nd(float *dA, float *dB, float *dC, int M, int K, int N)
{
int indA = TM * (threadIdx.x + blockIdx.x * blockDim.x);
int indB = TN * (threadIdx.y + blockIdx.y * blockDim.y);
float tmp[TM][TN] = {0.0f};
for (int index_q = 0; index_q < TM; index_q++)
{
for (int index_v = 0; index_v < TN; index_v++)
{
if (indA + index_q < M && indB + index_v < N)
{
for (int s = 0; s < K; s++)
{
tmp[index_q][index_v] += dA[(indA + index_q) * K + s] * dB[s * N + indB + index_v];
}
}
}
}
for (int index_q = 0; index_q < TM; index_q++)
{
for (int index_v = 0; index_v < TN; index_v++)
{
if (indA + index_q < M && indB + index_v < N)
{
dC[(indA + index_q) * N + indB + index_v] = tmp[index_q][index_v];
}
}
}
}
性能比较
| 机器 | 运行参数 | GPU use time | kernel time | CPU time | The error between CPU and GPU |
|---|---|---|---|---|---|
| 单卡A100 显存80G | M-K-N: 1024-1024-1024 GPU use time: 0.7971 second kernel time: 0.0247 second, 24.6882 ms grid dim: 32, 32, 1 block dim: 32, 32, 1 CPU time:3.78 second The error between CPU and GPU: 0.0000e+00 |
0.7971 | 0.0247 | 3.78 | 0.0000e+00 |
| 单卡3090 显存24G | M-K-N: 1024-1024-1024 GPU use time: 0.8331 second kernel time: 0.0106 second, 10.6388 ms grid dim: 32, 32, 1 block dim: 32, 32, 1 CPU time:2.19 second The error between CPU and GPU: 0.0000e+00 |
0.8331 | 0.0106 | 2.19 | 0.0000e+00 |
第四版本:重排索引
优化思路
优化矩阵load至share memory过程
- 选择blockDim=(32,32,1),TM=TN=4,BK=8(参考https://zhuanlan.zhihu.com/p/410278370)
- SA形状为[128,8],SB形状为[8,128],计算得到形状为[128,128]的子矩阵
- 0≤tid=threadldx.x+threadldx.y*blockDim.x≤1023
- smem_a_m(tid%128∈ {0,,127},smem_a_k=tid/128∈ {0,,8}
- smem_b_k=tid%8∈{0,…,8},smem_b_k=tid/8∈{0,…,127}
- 这种做法的特点是:BM * BK=BN * BK=BLOCK_DIM_x * BLOCK_DIM_y,需要重新根据一维线程索引排布为二维索引
代码实现
template <int BM, int BN, int BK, int TM, int TN>
__global__ void matrixKernel4nd(float *dA, float *dB, float *dC, int M, int K, int N)
{
__shared__ float SA[BM * BK];
__shared__ float SB[BK * BN];
int indA = TM * (blockIdx.x * blockDim.x);
int indB = TN * (blockIdx.y * blockDim.y);
int width = (K + BK - 1) / BK;
float tmp[TM * TN] = {0.0f};
int tid = threadIdx.x + threadIdx.y * blockDim.x;
int smem_a_m = tid % 128;
int smem_a_k = tid / 128;
int smem_b_k = tid % 8;
int smem_b_n = tid / 8;
for (int ph = 0; ph < width; ph++)
{
if (indA + smem_a_m < M && smem_a_k + ph * BK < K)
{
SA[smem_a_m * BK + smem_a_k] = dA[(indA + smem_a_m) * K + smem_a_k + ph * BK];
}
else
{
SA[smem_a_m * BK + smem_a_k] = 0.0f;
}
if (indB + smem_b_n < N && smem_b_k + ph * BK < K)
{
SB[smem_b_k * BN + smem_b_n] = dB[(smem_b_k + ph * BK) * N + indB + smem_b_n];
}
else
{
SB[smem_b_k * BN + smem_b_n] = 0.0f;
}
__syncthreads();
for (int index_q = 0; index_q < TM; index_q++)
{
for (int index_v = 0; index_v < TN; index_v++)
{
int reg_c_m = threadIdx.x * TM + index_q;
int reg_c_n = threadIdx.y * TN + index_v;
for (int index_k = 0; index_k < BK; index_k++)
{
tmp[index_q * TN + index_v] += SA[reg_c_m * BK + index_k] * SB[index_k * BN + reg_c_n];
}
}
}
__syncthreads();
}
for (int index_q = 0; index_q < TM; index_q++)
{
for (int index_v = 0; index_v < TN; index_v++)
{
int reg_c_m = threadIdx.x * TM + index_q;
int reg_c_n = threadIdx.y * TN + index_v;
if (indA + index_q < M && indB + index_v < N)
{
dC[(indA + reg_c_m) * N + indB + reg_c_n] = tmp[index_q * TN + index_v];
}
}
}
}
性能比较
| 机器 | 运行参数 | GPU use time | kernel time | CPU time | The error between CPU and GPU |
|---|---|---|---|---|---|
| 单卡A100 显存80G | M-K-N: 1024-1024-1024 GPU use time: 0.4615 second kernel time: 0.0091 second, 9.1244 ms grid dim: 32, 32, 1 block dim: 32, 32, 1 CPU time:3.80 second The error between CPU and GPU: 0.0000e+00 |
0.4615 | 0.0091 | 3.80 | 0.0000e+00 |
| 单卡3090 显存24G | M-K-N: 1024-1024-1024 GPU use time: 0.8300 second kernel time: 0.0102 second, 10.1694 ms grid dim: 32, 32, 1 block dim: 32, 32, 1 CPU time:2.19 second The error between CPU and GPU: 0.0000e+00 |
0.8300 | 0.0102 | 2.19 | 0.0000e+00 |
第五版本: float4访存
优化思路
float4类型访存
- float4是一种内置的数据类型,它连续存储四个float类型的数值,总共占用128位(16字节)的内存空间。借助float4可以连续访存4个浮点元素,提高访存速度,注意内存对齐
- 选择blockDim=(32,32,1),TM=TN=4,此时BM=BN=128,使用float4单个线程可以访问4个元素,因此选择BK=32,但是这种时候会导致寄存器爆炸
- blockDim=(16,16,1),TM=TN=BK=8
- SA形状为[128,8],SB形状为[8,128],计算得到形状为[128,128]的子矩阵
- 0≤tid=threadldx.x+threadldx.y * blockDim.x≤255
- smem_a_m=tid/2∈{0…,127},smem_a_k=tid%2 ∈{0,1}
- smem_b_k=tid/32 ∈{0…,8},smem_b_k=tid%32 ∈{0,…,32}
代码实现
template <int BM, int BN, int BK, int TM, int TN>
__global__ void matrixKernel5th(float *dA, float *dB, float *dC, int M, int K, int N)
{
__shared__ float SA[BM * BK * 2];
__shared__ float SB[BK * BN * 2];
int indA = TM * (blockIdx.x * blockDim.x);
int indB = TN * (blockIdx.y * blockDim.y);
int width = (K + BK - 1) / BK;
float tmp[TM * TN] = {0.0f};
int tid = threadIdx.x + threadIdx.y * blockDim.x;
int smem_a_m = tid / 2;
int smem_a_k = tid % 2;
int smem_b_k = tid / 32;
int smem_b_n = tid % 32;
float a[4];
float b[4];
float com_a[TM];
float com_b[TN];
//------------
int ph = 0;
(float4 &)a[0] = (float4 &)dA[(indA + smem_a_m) * K + 4 * smem_a_k + ph * BK];
SA[(4 * smem_a_k) * BM + smem_a_m + ph % 2 * BM * BK] = a[0];
SA[(4 * smem_a_k + 1) * BM + smem_a_m + ph % 2 * BM * BK] = a[1];
SA[(4 * smem_a_k + 2) * BM + smem_a_m + ph % 2 * BM * BK] = a[2];
SA[(4 * smem_a_k + 3) * BM + smem_a_m + ph % 2 * BM * BK] = a[3];
(float4 &)b[0] = (float4 &)dB[(smem_b_k + ph * BK) * N + indB + 4 * smem_b_n];
(float4 &)SB[smem_b_k * BN + 4 * smem_b_n] = (float4 &)b[0];
__syncthreads();
for (int ph = 1; ph < width; ph++)
{
(float4 &)a[0] = (float4 &)dA[(indA + smem_a_m) * K + 4 * smem_a_k + ph * BK];
(float4 &)b[0] = (float4 &)dB[(smem_b_k + ph * BK) * N + indB + 4 * smem_b_n];
//-------------
for (int index_k = 0; index_k < BK; index_k++)
{
(float4 &)com_a[0] = (float4 &)SA[index_k * BM + threadIdx.x * TM + (ph - 1) % 2 * BM * BK];
(float4 &)com_a[4] = (float4 &)SA[index_k * BM + threadIdx.x * TM + 4 + (ph - 1) % 2 * BM * BK];
(float4 &)com_b[0] = (float4 &)SB[index_k * BN + threadIdx.y * TN + (ph - 1) % 2 * BN * BK];
(float4 &)com_b[4] = (float4 &)SB[index_k * BN + threadIdx.y * TN + 4 + (ph - 1) % 2 * BN * BK];
for (int index_q = 0; index_q < TM; index_q++)
{
for (int index_v = 0; index_v < TN; index_v++)
{
tmp[index_q * TN + index_v] += com_a[index_q] * com_b[index_v];
}
}
}
SA[(4 * smem_a_k) * BM + smem_a_m + ph % 2 * BM * BK] = a[0];
SA[(4 * smem_a_k + 1) * BM + smem_a_m + ph % 2 * BM * BK] = a[1];
SA[(4 * smem_a_k + 2) * BM + smem_a_m + ph % 2 * BM * BK] = a[2];
SA[(4 * smem_a_k + 3) * BM + smem_a_m + ph % 2 * BM * BK] = a[3];
(float4 &)SB[smem_b_k * BN + 4 * smem_b_n + ph % 2 * BN * BK] = (float4 &)b[0];
__syncthreads();
}
//--------------
ph = width;
for (int index_k = 0; index_k < BK; index_k++)
{
(float4 &)com_a[0] = (float4 &)SA[index_k * BM + threadIdx.x * TM + (ph - 1) % 2 * BM * BK];
(float4 &)com_a[4] = (float4 &)SA[index_k * BM + threadIdx.x * TM + 4 + (ph - 1) % 2 * BM * BK];
(float4 &)com_b[0] = (float4 &)SB[index_k * BN + threadIdx.y * TN + (ph - 1) % 2 * BN * BK];
(float4 &)com_b[4] = (float4 &)SB[index_k * BN + threadIdx.y * TN + 4 + (ph - 1) % 2 * BN * BK];
for (int index_q = 0; index_q < TM; index_q++)
{
for (int index_v = 0; index_v < TN; index_v++)
{
tmp[index_q * TN + index_v] += com_a[index_q] * com_b[index_v];
}
}
}
for (int index_q = 0; index_q < TM; index_q++)
{
for (int index_v = 0; index_v < TN; index_v++)
{
int reg_c_m = threadIdx.x * TM + index_q;
int reg_c_n = threadIdx.y * TN + index_v;
if (indA + index_q < M && indB + index_v < N)
{
dC[(indA + reg_c_m) * N + indB + reg_c_n] = tmp[index_q * TN + index_v];
}
}
}
}
性能比较
| 机器 | 运行参数 | GPU use time | kernel time | CPU time | The error between CPU and GPU |
|---|---|---|---|---|---|
| 单卡A100 显存80G | M-K-N: 1024-1024-1024 GPU use time: 0.8365 second kernel time: 0.0000 second, 0.0000 ms grid dim: 32, 32, 1 block dim: 32, 32, 1 CPU time:3.83 second The error between CPU and GPU: 1.7090e+03 |
0.8365 | 0.0000 | 3.83 | 1.7090e+03 |
| 单卡3090 显存24G | M-K-N: 1024-1024-1024 GPU use time: 0.6499 second kernel time: 0.0000 second, 0.0000 ms grid dim: 32, 32, 1 block dim: 32, 32, 1 CPU time:2.19 second The error between CPU and GPU: 1.7090e+03 |
0.6499 | 0.0000 | 2.19 | 1.7090e+03 |
疑问点:cpu与gpu版本结果不一致
第六版本: 解bank冲突
优化思路
bankconflict
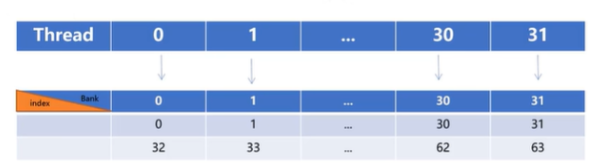
- share memory划分为32个Bank,每个Bank的宽度是4Bytes,如果同一个warp的32个线程访问不
同Bank,性能最佳,否则就会产生bank conflict
- 对于固定的线程(threadldx.x,threadldx.y),计算的c元素索引为 [8xthreadIdx.x+index_q][8xthreadldx.y+index_y],访问的SA索引为 (8 * threadldx.x+index_q)xBK+index_k=64 * threadldx.x+index_q * 8+index_k,访问的SB索引为 index_k * 128+8 * threadldx.y+indexv,固定index_q和index_v,发现SA的访问存在Bank conflict
- 对SA的load做一个转置得到[8][128],这样处理可以避免Bank conflict
代码实现
template <int BM, int BN, int BK, int TM, int TN>
__global__ void matrixKernel6th(float *dA, float *dB, float *dC, int M, int K, int N)
{
__shared__ float SA[BM * BK * 2];
__shared__ float SB[BK * BN * 2];
int indA = TM * (blockIdx.x * blockDim.x);
int indB = TN * (blockIdx.y * blockDim.y);
int width = (K + BK - 1) / BK;
int tid = threadIdx.x + threadIdx.y * blockDim.x;
int smem_a_m = tid / 2;
int smem_a_k = tid % 2;
int smem_b_k = tid / 32;
int smem_b_n = tid % 32;
float4 a[1];
float4 b[1];
float4 com_a[2];
float4 com_b[2];
float4 tmp[16];
memset(tmp, 0.0f, sizeof(tmp));
//------------
int ph = 0;
(float4 &)a[0] = (float4 &)dA[(indA + smem_a_m) * K + 4 * smem_a_k + ph * BK];
SA[(4 * smem_a_k) * BM + smem_a_m] = a[0].x;
SA[(4 * smem_a_k + 1) * BM + smem_a_m] = a[0].y;
SA[(4 * smem_a_k + 2) * BM + smem_a_m] = a[0].z;
SA[(4 * smem_a_k + 3) * BM + smem_a_m] = a[0].w;
(float4 &)b[0] = (float4 &)dB[(smem_b_k + ph * BK) * N + indB + 4 * smem_b_n];
(float4 &)SB[smem_b_k * BN + 4 * smem_b_n] = (float4 &)b[0];
for (int id = 0; id < 4; id++)
{
if (indB + 4 * smem_b_n + id >= N || smem_b_k + ph * BK >= K)
{
SB[smem_b_k * BN + 4 * smem_b_n + id] = 0.0f;
}
}
__syncthreads();
for (int ph = 1; ph < width; ph++)
{
(float4 &)a[0] = (float4 &)dA[(indA + smem_a_m) * K + 4 * smem_a_k + ph * BK];
(float4 &)b[0] = (float4 &)dB[(smem_b_k + ph * BK) * N + indB + 4 * smem_b_n];
//-------------
for (int index_k = 0; index_k < BK; index_k++)
{
(float4 &)com_a[0] = (float4 &)SA[index_k * BM + threadIdx.x * TM + (ph - 1) % 2 * BM * BK];
(float4 &)com_a[1] = (float4 &)SA[index_k * BM + threadIdx.x * TM + 4 + (ph - 1) % 2 * BM * BK];
(float4 &)com_b[0] = (float4 &)SB[index_k * BN + threadIdx.y * TN + (ph - 1) % 2 * BN * BK];
(float4 &)com_b[1] = (float4 &)SB[index_k * BN + threadIdx.y * TN + 4 + (ph - 1) % 2 * BN * BK];
addSpecial4(tmp[0], com_a[0].x, com_b[0]); // index_q = 0, 0<= index_v <= 3
addSpecial4(tmp[1], com_a[0].x, com_b[1]); // index_q = 0, 4<= index_v <= 7
addSpecial4(tmp[2], com_a[0].y, com_b[0]); // index_q = 1, 0<= index_v <= 3
addSpecial4(tmp[3], com_a[0].y, com_b[1]); // index_q = 1, 4<= index_v <= 7
addSpecial4(tmp[4], com_a[0].z, com_b[0]); // index_q = 2, 0<= index_v <= 3
addSpecial4(tmp[5], com_a[0].z, com_b[1]); // index_q = 2, 4<= index_v <= 7
addSpecial4(tmp[6], com_a[0].w, com_b[0]); // index_q = 3, 0<= index_v <= 3
addSpecial4(tmp[7], com_a[0].w, com_b[1]); // index_q = 3, 4<= index_v <= 7
addSpecial4(tmp[8], com_a[1].x, com_b[0]); // index_q = 4, 0<= index_v <= 3
addSpecial4(tmp[9], com_a[1].x, com_b[1]); // index_q = 4, 4<= index_v <= 7
addSpecial4(tmp[10], com_a[1].y, com_b[0]); // index_q =5, 0<= index_v <= 3
addSpecial4(tmp[11], com_a[1].y, com_b[1]); // index_q = 5, 4<= index_v <= 7
addSpecial4(tmp[12], com_a[1].z, com_b[0]); // index_q = 6, 0<= index_v <= 3
addSpecial4(tmp[13], com_a[1].z, com_b[1]); // index_q = 6, 4<= index_v <= 7
addSpecial4(tmp[14], com_a[1].w, com_b[0]); // index_q =7, 0<= index_v <= 3
addSpecial4(tmp[15], com_a[1].w, com_b[1]); // index_q = 7, 4<= index_v <= 7
}
SA[(4 * smem_a_k) * BM + smem_a_m + ph % 2 * BM * BK] = a[0].x;
SA[(4 * smem_a_k + 1) * BM + smem_a_m + ph % 2 * BM * BK] = a[0].y;
SA[(4 * smem_a_k + 2) * BM + smem_a_m + ph % 2 * BM * BK] = a[0].z;
SA[(4 * smem_a_k + 3) * BM + smem_a_m + ph % 2 * BM * BK] = a[0].w;
(float4 &)SB[smem_b_k * BN + 4 * smem_b_n + ph % 2 * BN * BK] = (float4 &)b[0];
__syncthreads();
}
//--------------
ph = width;
for (int index_k = 0; index_k < BK; index_k++)
{
(float4 &)com_a[0] = (float4 &)SA[index_k * BM + threadIdx.x * TM + (ph - 1) % 2 * BM * BK];
(float4 &)com_a[1] = (float4 &)SA[index_k * BM + threadIdx.x * TM + 4 + (ph - 1) % 2 * BM * BK];
(float4 &)com_b[0] = (float4 &)SB[index_k * BN + threadIdx.y * TN + (ph - 1) % 2 * BN * BK];
(float4 &)com_b[1] = (float4 &)SB[index_k * BN + threadIdx.y * TN + 4 + (ph - 1) % 2 * BN * BK];
addSpecial4(tmp[0], com_a[0].x, com_b[0]); // index_q = 0, 0<= index_v <= 3
addSpecial4(tmp[1], com_a[0].x, com_b[1]); // index_q = 0, 4<= index_v <= 7
addSpecial4(tmp[2], com_a[0].y, com_b[0]); // index_q = 1, 0<= index_v <= 3
addSpecial4(tmp[3], com_a[0].y, com_b[1]); // index_q = 1, 4<= index_v <= 7
addSpecial4(tmp[4], com_a[0].z, com_b[0]); // index_q = 2, 0<= index_v <= 3
addSpecial4(tmp[5], com_a[0].z, com_b[1]); // index_q = 2, 4<= index_v <= 7
addSpecial4(tmp[6], com_a[0].w, com_b[0]); // index_q = 3, 0<= index_v <= 3
addSpecial4(tmp[7], com_a[0].w, com_b[1]); // index_q = 3, 4<= index_v <= 7
addSpecial4(tmp[8], com_a[1].x, com_b[0]); // index_q = 4, 0<= index_v <= 3
addSpecial4(tmp[9], com_a[1].x, com_b[1]); // index_q = 4, 4<= index_v <= 7
addSpecial4(tmp[10], com_a[1].y, com_b[0]); // index_q =5, 0<= index_v <= 3
addSpecial4(tmp[11], com_a[1].y, com_b[1]); // index_q = 5, 4<= index_v <= 7
addSpecial4(tmp[12], com_a[1].z, com_b[0]); // index_q = 6, 0<= index_v <= 3
addSpecial4(tmp[13], com_a[1].z, com_b[1]); // index_q = 6, 4<= index_v <= 7
addSpecial4(tmp[14], com_a[1].w, com_b[0]); // index_q =7, 0<= index_v <= 3
addSpecial4(tmp[15], com_a[1].w, com_b[1]); // index_q = 7, 4<= index_v <= 7
}
for (int index_q = 0; index_q < TM; index_q++)
{
(float4 &)dC[(indA + threadIdx.x * TM + index_q) * N + indB + threadIdx.y * TN] = (float4 &)tmp[2 * index_q];
(float4 &)dC[(indA + threadIdx.x * TM + index_q) * N + indB + threadIdx.y * TN + 4] = (float4 &)tmp[2 * index_q + 1];
}
}
性能比较
| 机器 | 运行参数 | GPU use time | kernel time | CPU time | The error between CPU and GPU |
|---|---|---|---|---|---|
| 单卡A100 显存80G | M-K-N: 1024-1024-1024 GPU use time: 0.6988 second kernel time: 0.0000 second, 0.0000 ms grid dim: 32, 32, 1 block dim: 32, 32, 1 CPU time:3.81 second The error between CPU and GPU: 1.7090e+03 |
0.6988 | 0.0000 | 3.81 | 1.7090e+03 |
| 单卡3090 显存24G | M-K-N: 1024-1024-1024 GPU use time: 0.6567 second kernel time: 0.0000 second, 0.0001 ms grid dim: 32, 32, 1 block dim: 32, 32, 1 CPU time:2.19 second The error between CPU and GPU: 1.7090e+03 |
0.6567 | 0.0000 | 2.19 | 1.7090e+03 |
第七版本: 内积转外积
优化思路
降低sharememory的读取-V7
- 得到SA[8][128]和SB[8][128]以后,如何优化计算过程?
- 计算c过程中,同样存在重复读取share memory的问题
- 此时SA和SB对于index_k是间断的,但是对于index_q和index_v是连续的,借助寄存器内存和float4快速访问share memory
- 内积一一>外积
cuda入门
将cuda入门相关的概念放到后面,依据前面学习矩阵乘法涉及到的cuda命令,再依次学习cuda基本概念,以练促学,加深学习的深度
内容过多,平移到CUDA编程基础入门系列